ผู้เขียนบทความ : นางสาวกัลยาวดี ชูจรูญเดช , นายชนทัต ดำนุ่น , นายภควรรษ เอียดพวง
COE15
คณะวิศวกรรมศาสตร์ : สาขาวิศวกรรมคอมพิวเตอร์
วิชา:04-513-201 การโปรแกรมคอมพิวเตอร์ขั้นสูง 1/2566
1.ความเป็นมา
การวิจัยในครั้งนี้มีวัตถุประสงค์เพื่อการออกแบบและทดลองการใช้ชุดทดลองคัดแยกสีวัตถุอัตโนมัติ บนสายพานลำ เลียงด้วยบอร์ดโมดูลแยกสีอาดูโน สามารถปฏิบัติงานได้ตามการออกแบบให้แยกชนิดวัตถุที่ เป็นสีแดง สีเขียว และสีนํ้าเงิน แล้วเคลื่อนย้ายวัตถุอัตโนมัติไปยังที่กำ หนดไว้โดยอาศัยการควบคุมของ ESP32 NodeMCU โดยใช้ตัวตรวจจับด้วยโมดูลแยกสี Arduino TCS230 เป็นเซนเซอร์อ่านค่าปริมาณของ ความเข้ม ของแสงที่กระทบกับวัตถุและสะท้อนกลับมายังเซนเซอร์แปลผลเป็นสัญญาณที่แตกต่างกันตามแต่ละสี ของวัตถุ นอกจากนี้งานวิจัยสามารถนำ เอาไปใช้เป็นพื้นฐานในการฝึกปฏิบัติ เพื่อนำ ไปใช้เป็นแนวทางกับโรงงาน อุตสาหกรรมประเภทงานแยกวัตถุในการผลิตเพื่อจำแนกวัตถุสีได้ตามที่โปรแกรมสั่งงานและสามารถนำ ไปใช้ใน โรงงานสิ่งพิมพ์ โรงงานผลิตรถยนต์ โรงงานผลิตชิ้นส่วนอิเล็กทรอนิกส์ รวมถึงระบบการเคลื่อนที่อัตโนมัติอื่นๆ ที่เกี่ยวข้องได้อย่างมีประสิทธิภาพ ผลการออกแบบและทดลองใช้ชุดทดลองคัดแยกสีวัตถุอัตโนมัติบนสายพานลำเลียงด้วยบอร์ดโมดูลแยกสีอาดูโนพบว่า สามารถคัดแยกวัตถุสีแดง สีเขียว และสีนํ้าเงิน โดยใช้เวลาเฉลี่ยของวัตถุที่ทดสอบปรากฏ ว่าวัตถุสีแดง 9.75 วินาที วัตถุสีเขียว 9.96 วินาที และวัตถุสีนํ้าเงิน 9.95 วินาที และสามารถแยกสีวัตถุลงใน ตำแหน่งที่ต้องการได้ถูกต้อง คำสำคัญ: การคัดแยกวัตถุสีอัตโนมัติ , ชุดทดลองแยกวัตถุสี
2.วัตถุประสงค์
2.1 เพื่อออกแบบชุดทดลองคัดแยกสีอัตโนมัติ บนระบบสายพานลําเลียงโดยโมดูลแยกสี
2.2 เพื่อทดลองการใช้ชุดทดลองคัดแยกสี อัตโนมัติบนระบบสายพานลําาเลียงโดยโมดูลแยกสี
3.ขอบเขต
3.1 สามารถแยกวัตถุสีได้ ถ้าวัตถุเป็นสีที่ไม่ใช่สีที่ต้องการเครื่องจะดีดวัตถุออก
3.2 สามารถนันจำนวนของวัตถุได้
3.3 แสดงผลผ่านแอพBlynk
4.ประโยชน์ที่คาดว่าจะได้รับ
4.1ได้ศึกษาและเข้าใจการเขียนโปรแกรมภาษา Python เพื่อสร้างระบบ
4.2 สามารถนำความรู้การเขียนโปรแกรมภาษา Python ไปประยุกต์ใช้ได้จริง
4.3 สามารถเขียนโปรแกรมภาษา Python เพื่อสร้างระบบ
5.ความรู้ที่เกี่ยวข้อง
5.1 ESP 32



ในโค้ดนี้:
- เราใช้ไลบรารี
WiFi.hเพื่อทำการติดต่อกับเครือข่าย Wi-Fi. - คุณต้องปรับค่า
ssidและpasswordเพื่อให้เข้ากับเครือข่าย Wi-Fi ของคุณ. - ใน
setup()เราทำการเชื่อมต่อ Wi-Fi และรอจนกว่าจะเชื่อมต่อเสร็จสิ้น แล้วแสดง IP Address บน Serial Monitor. - ใน
loop()คุณสามารถเพิ่มโค้ดที่คุณต้องการรันตลอดเวลา เช่น การควบคุมอุปกรณ์หรือส่งข้อมูลผ่าน Wi-Fi.
โปรแกรมนี้เป็นแค่ตัวอย่างเบื้องต้นเพื่อเริ่มต้นกับ ESP32 คุณสามารถเพิ่มฟังก์ชันและโค้ดเพิ่มเติมตามความต้องการของคุณได้ในส่วน loop() และ setup() ของโค้ด.
5.2 เซนเซอร์ตรวจจับสี RGB Color TCS230




ในโค้ดนี้:
- เราใช้ Adafruit_TCS34725 ไลบรารีเพื่อควบคุมเซนเซอร์สี TCS230.
- เรากำหนดขา SDA_PIN และ SCL_PIN เพื่อกำหนดขาการเชื่อมต่อ I2C สำหรับ ESP32.
- ในฟังก์ชัน
setup(), เราตั้งค่าเซนเซอร์สี TCS230 โดยใช้ค่าค่าการรวมของแสงและการเพิ่มแสง. - ในฟังก์ชัน
loop(), เราอ่านค่าแสงแดง (red), สีเขียว (green), และสีน้ำเงิน (blue) จากเซนเซอร์แล้วคำนวณอุณหภูมิสีและค่า Lux. - ผลลัพธ์จะถูกส่งไปยัง Serial Monitor เพื่อแสดงผล.
โปรแกรมนี้ใช้งานเซนเซอร์สี TCS230 และนำผลลัพธ์ไปแสดงผลผ่าน Serial Monitor บน Arduino IDE เพื่อควบคุมการตรวจจับสี RGB และอุณหภูมิสีของเซนเซอร์นี้. ตรวจสอบการติดตั้ง Adafruit TCS34725 ไลบรารีและขาการเชื่อมต่อ I2C กับ ESP32 ให้แน่ใจว่าถูกต้องและเชื่อมต่ออย่างถูกต้องก่อนใช้งานโค้ดนี้.
5.3 เซ็นเซอร์นับจำนวน Counter 0-999999 12Vdc


ในโค้ดนี้:
- เรากำหนดค่า
maxCountเป็น 999999 เพื่อกำหนดจำนวนสูงสุดที่เครื่องนับจะนับถึง. - เราใช้ตัวแปร
countเพื่อเก็บค่านับปัจจุบันและเริ่มต้นที่ 0. - ใน
setup(), เราเริ่มต้นการสื่อสารผ่าน Serial Monitor ที่อัตราเร็ว 9600 bps. - ใน
loop(), เราตรวจสอบว่าค่านับcountยังไม่เกินmaxCountหากเป็นเช่นนั้นจะแสดงค่านับปัจจุบันและเพิ่มค่าcountขึ้น 1. เมื่อcountเท่ากับmaxCountเราจะแสดงข้อความ “เครื่องนับถึงจำนวนสูงสุด” และรอ 1 วินาทีก่อนที่จะรีเซ็ตค่าcountเป็น 0.
โปรแกรมนี้จะทำให้ ESP32 นับจำนวนอัตโนมัติจาก 0 ถึง 999999 และเมื่อถึงจำนวนสูงสุดจะรีเซ็ตค่านับและเริ่มนับใหม่. ค่านับปัจจุบันจะถูกแสดงผ่าน Serial Monitor ของ ESP32.
5.4 power supply 5v3A

การจ่ายไฟฟ้าที่มีความต่ำในระดับแรงดัน ในกรณีนี้คือ 5 โวลต์ และกระแสไฟฟ้าที่มีความสามารถในการให้กระแสไฟฟ้าได้ต่อเนื่องที่ระดับ 3 แอมป์ (อัมแพร์) ซึ่งหมายถึงความสามารถในการให้กระแสไฟฟ้าต่อเนื่องขนาด 3 แอมป์ที่แรงดันไฟฟ้าความสามารถของหน่วยจ่ายไฟฟ้านี้คือ 5 โวลต์และ 3 แอมป์ นี้มักใช้ในอุปกรณ์และโครงการอิเล็กทรอนิกส์ต่าง ๆ โดยเฉพาะเมื่อพวกเขาต้องการแหล่งจ่ายไฟฟ้า 5 โวลต์ดีซีที่มีความสามารถในการทำงานอย่างน่าเชื่อถือที่มีความจุปัจจุบันเพียงพอ
นี่คือตัวอย่างใช้หน่วยจ่ายไฟฟ้า 5 โวลต์ 3 แอมป์:
- ไมโครคอนโทรลเลอร์และบอร์ดการพัฒนา: ไมโครคอนโทรลเลอร์หลายรุ่น เช่น บอร์ด Arduino และ Raspberry Pi ทำงานที่แรงดัน 5 โวลต์และต้องการแหล่งจ่ายไฟฟ้าที่เสถียรเพื่อให้ทำงานได้อย่างถูกต้อง
- แถบ LED: แถบ LED RGB ที่สามารถตั้งค่าสีได้บางชนิดอาจต้องการหน่วยจ่ายไฟฟ้า 5 โวลต์เพื่อให้ทำงานและสามารถบริโภคกระแสไฟฟ้าในปริมาณต่าง ๆ ขึ้นอยู่กับจำนวนของแถบ LED
- อุปกรณ์ USB: บางอุปกรณ์ USB อาจต้องการแหล่งจ่ายไฟฟ้า 5 โวลต์ที่เฉพาะเจาะจงเมื่อพวกเขาดูเจียวกระแสไฟฟ้ามากกว่าที่พอให้ (ซึ่งมักเป็นปริมาณไฟฟ้าสูงสุด 0.5 แอมป์หรือ 1 แอมป์)
- มอเตอร์ขนาดเล็กและอ็อกจูเอเตอร์: มอเตอร์ขนาดเล็กบางรุ่นและอ็อกจูเอเตอร์ที่ใช้ในโครงการหุ่นยนต์หรือโครงการอัตโนมัติอาจต้องการหน่วยจ่ายไฟฟ้า 5 โวลต์
- การชาร์จอุปกรณ์มือถือ: หน่วยจ่ายไฟฟ้าที่มีพอร์ต USB มักถูกใช้ในการชาร์จสมาร์ทโฟน แท็บเล็ต และอุปกรณ์ USB อื่น ๆ
เมื่อเลือกหน่วยจ่ายไฟฟ้า ควรพิจารณาทั้งแรงดันและความจุปัจจุบันที่อุปกรณ์ของคุณต้องการ แรงดันควรตรงกับความต้องการของอุปกรณ์ และความสามารถในการให้กระแสไฟฟ้า (ในกรณีนี้ 3 แอมป์) ควรเท่ากับหรือมากกว่าที่อุปกรณ์ต้องการเพื่อให้ทำงานอย่างเสถียรและเชื่อถือได้. การใช้หน่วยจ่ายไฟฟ้าที่มีความสามารถให้กระแสไฟฟ้าสูงกว่าที่ต้องการโดยทั่วไปปลอดภัย โดยอุปกรณ์จะดึงกระแสไฟฟ้าเพียงในปริมาณที่ต้องการเท่านั้น.
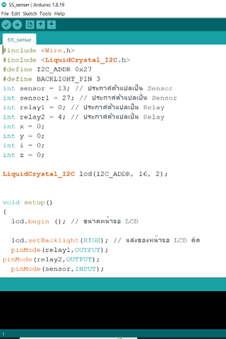
5.5 จอ LCD 16*2 I2C


ในโค้ดนี้:
- เรารวมไลบรารี
Wire.hเพื่อใช้สื่อสารผ่าน I2C และLiquidCrystal_I2C.hเพื่อใช้ควบคุมจอ LCD 16×2. - เรากำหนดที่อยู่ I2C ของจอ LCD ใน
LiquidCrystal_I2Cconstructor (ในที่นี้ใช้ 0x27 แต่ของคุณอาจแตกต่างกันไป). - ใน
setup(), เราเริ่มต้นสื่อสารผ่าน I2C และเริ่มต้นจอ LCD โดยใช้init()และเปิดไฟพื้นหลังบนจอ LCD ด้วยbacklight(). - เราใช้
setCursor()เพื่อตั้งค่าตำแหน่งและแสดงข้อความบนจอ LCD 16×2 ในตัวอย่างนี้เราแสดง “Hello,” บนแถวแรกและ “World!” บนแถวที่สองของจอ LCD. - การรหัสของคุณสามารถใส่ไว้ใน
loop()เพื่อให้ทำงานตลอดเวลาหรือตามความต้องการของโปรเจกต์ของคุณ.
5.6 ชุดสายพาน

ชุดสายพาน (Cable Management Kit) เป็นชุดอุปกรณ์ที่ใช้ในการจัดการสายไฟหรือสายสื่อสารในที่ทำงานหรือโครงการที่มีการเชื่อมต่อหลายสาย โดยวัตถุประสงค์หลักคือเพื่อให้สายไม่เดินไปตามแท่นที่และมีการจัดเก็บที่เรียบร้อย เพื่อป้องกันสายจากการปูดหรือขาดสัญญาณ และทำให้ง่ายต่อการดูแลรักษาและการเปลี่ยนแปลง.
ชุดสายพานอาจประกอบด้วยอุปกรณ์ต่าง ๆ ที่มีในบรรจุภัณฑ์เดียว หรือคุณสามารถซื้อชิ้นส่วนแยกต่าง ๆ ตามความต้องการของคุณ เช่น:
- ตลับสาย (Cable Sleeves): สามารถเป็นท่อพลาสติกหรือผ้าพันสายที่ใช้ใส่สายเพื่อรวมสายเข้าด้วยกันและช่วยป้องกันการเสียสัญญาณหรือการขาดสาย.
- หางจับสาย (Cable Ties): มักเป็นเครื่องมือเสริมที่ใช้รัดสายให้แน่นและเรียบร้อย. มีหลายรูปแบบ ที่ใช้งานง่ายและสามารถปลดได้.
- พิวเตอร์สาย (Cable Organizers): สามารถเป็นส่วนหนึ่งของโต๊ะหรืออุปกรณ์เก็บของที่มีช่องที่ใช้ใส่สายไฟเพื่อที่จะลองเก็บและป้องกันสายได้อย่างเรียบร้อย.
- สายแนวนอน (Raceways): คล้ายกับพิวเตอร์สายแต่มีโครงสร้างที่สามารถปิดบนผนังหรือพื้น.
- แท็บเล็ตขั้นตอน (Cable Clips): คลิปที่ใช้เก็บสายไฟในตำแหน่งที่แน่นหนา โดยที่ไม่ต้องเจาะผนัง.
การใช้ชุดสายพานช่วยลดความรกในสายและทำให้ห้องหรือพื้นที่ทำงานดูเรียบร้อยและสะดวกในการเคลื่อนย้ายและบำรุงรักษาสายไฟและสายสื่อสารต่าง ๆ ในโครงการ
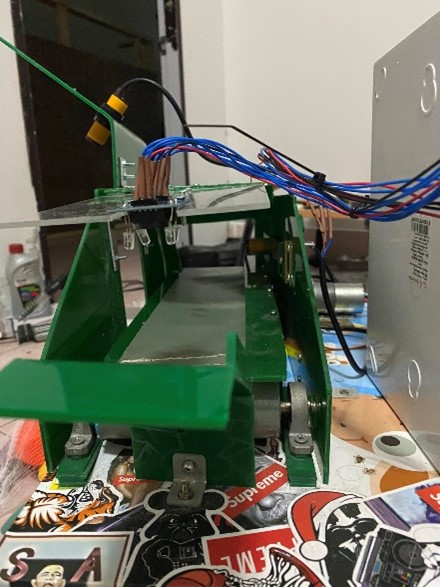
6.การออกแบบ
6.1การออกแบบโครงสร้างชุดทดลองคัดแยกสีอัตโนมัติบนระบบสายพานลำเลียงโดยโมดูลแยกสี
การออกแบบโครงร่างของชุดทดลองคัดแยกสีอัตโนมัติบนระบบสายพานลำเลียงโดยโมดูลแยกสี โดยการออกแบบนั้นจะออกชิ้นงานมีเครื่องจะมี
ขนาด 24 x 48 x 30 cm. โดยมีลักษณะเป็นสายพานลำเลียงเพื่อทำหน้าที่ขนส่งสินค้า และใช้ RGB Color Sensor Module ในการแยะสินค้า และ ใช้ Proximity Sensor ในการนับจำนวนสินค้า โดยมีแหล่งจ่ายหลักที่ให้แรงดันไฟฟ้า 12V มีสวิตช์ทำหน้าที่เปิด-ปิด และมี Lcd ขนาด 16×2 ทำหน้าที่แจ้งจำนวนของปริมาณสินค้า
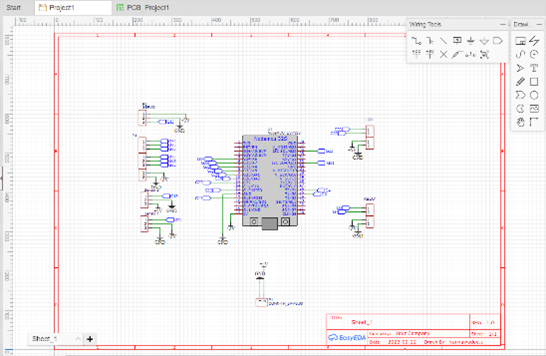
7.การออกแบบวงจรและสร้าง
7.1 การเชื่อมต่อของอุปกรณ์ 1บทความนี้จะกล่าวถึงการออกแบบระบบการทำของระบบ ด้วยการนำ ESP32 เข้ามาประยุกต์ใช้งาน ทำหน้าที่เป็นหน่วยประมวลผลหลัก โดยจะรับค่าจาก Color Sensor Module และ Proximity Sensor ทำหน้าที่แยกสินค้าโดยใช้ Servo และนับจำนวน โดยทั้งจะจำนวนของสินค้าไปแสดงผลที่ Lcd ขนาด 16×2 และเชื่อมต่อร่วมกับดีเลย์เพื่อสั่งงานให้มอเตอร์ทำงานเมื่อเครื่องเริ่มทำงาน

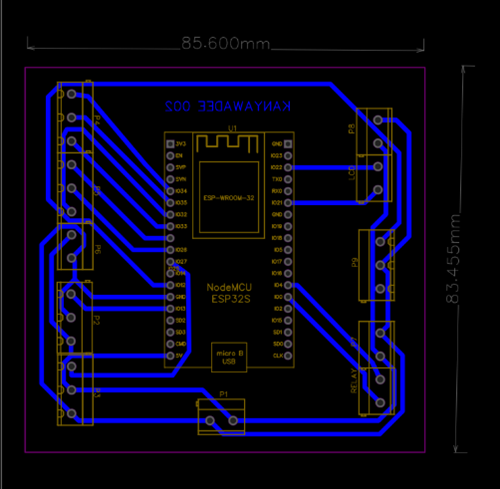
7.2การออกแบบวงจร เมื่อได้แบบแผ่นวงจรนำไปปริ้น และนำแผ่นทองแดงสำหรับทำแผ่นวงจร โดยที่เราต้องกำหนดขนาดแผ่นทองแดงของเราให้ตรงตามขนาดแผ่นวงจรPCB จากนั้นนาบกับแผ่นกระดาษที่ปริ้นรูปแผ่น PCB แล้วนำเตารีดใช้ความร้อนสูงสุดรีดลงบนกระดาษ ใช้เวลาในการรีด10-15นาที เมื่อสังเกตว่ากระดาษติดกับแผ่นทองจนสนิทแล้ว ค่อยๆดึงออก เมื่อน้ำหมึกติดบนแผ่นทองแล้ว จากนั้นนำแผ่นทองแดงใส่ในภาชนะที่ใส่น้ำยากัดแผ่นปริ้นผสมกับน้ำใส่แค่พอจมแผ่นทองแดง ใช้วิธีการตะแคงมาหลายๆครั้ง หรือจะใช้เครื่องตะแคงไปเรื่อย จนกว่าจะเหลือแค่ลายปริ้น เมื่อทำการกัดลายเสร็จเรียบร้อยแล้ว จะเหลือเพียงเส้นที่เป็นน้ำหมึก จากนั้นทำการใช้ทินเนอร์ หรือน้ำยาล้างเล็บเพื่อล้างน้ำหมึกออก ให้เหลือแค่เส้นทองแดงเพื่อทำการต่อกับอุปกรณ์ภายนอกเมื่อล้างน้ำหมึกบนแผ่นวงจรพิมพ์เสร็จแล้วขั้นตอนต่อไปคือการเจาะรูสำหรับติดตั้งอุปกรณ์บนแผ่นวงจรพิมพ์โดยใช้สว่านขนาด 0.8 มม. และ 1.1 มม. จากนั้นบัดกรีบนแผ่นวงจรกับ terminal เพื่อติดตั้งอุปกรณ์ของเรา เมื่อทำการบัดกรีเข้ากับแผ่นวงจรเสร็จเรียบร้อย ต่อไปทำการเคลือบแผ่นทองแดงเผื่อไม่ให้เส้นทองแดงหลุด และป้องกันสนิมขึ้นทีบนทองแดง ขั้นตอนสุดท้ายในการสร้างแผ่นวงจร คือการตรวจเช็ควงจรถูกต้องหรือไม่ ด้วนการใช้มิเตอร์วัดไฟ เมื่อทำการตรวจวงจรถูกต้องเรียบร้อยก็ไห้ทำการติดตั้งและเชื่อมต่อวงจรไปยังอุปกรณ์ที่อยู่ภายในกล่องควบคุม
7.3การประกอบอุปกรณ์ควบคุมในกล่องและประกอบกล่อง
อุปกรณ์ติดตั้งด่านในกล่องวงจร ขั้นตอนที่1 ติดตั้ง Esp32 เข้ากับแผ่นวงจรและเจาะรูให้กับแหล่งจ่ายไฟเข้ากับด้านข้างของกล่อง จากนั้นขันน็อตล้อคไว้ให้แน่นพอสมควรโดยน็อตที่ใช้ในการยึดกับอุปกรณ์ต่างๆบนแผ่นรองใช้น็อต m3 12mm. ตามด้วยใช้สายรัดเก็บสายไฟให้เรียบร้อย
ขั้นตอนที่2 เจาะกล่องด้านข้างเป็นทางเดินสายไฟของแหล่งจ่ายไฟ โดยจะวางตำแหน่งต่างๆก่อนเจาะ จากนั้นทำการต่อสายไฟเข้ากับอุปกรณ์ทั้งหมดที่อยู่ในกล่องวงจร
ขั้นตอนที่3 เมื่อทำการเชื่อมสายต่อเข้ากับอุปกรณ์ทั้งหมดแล้ว นำสายไฟที่ต่อกับอุปกรณ์ต่างๆ แผ่นรอง ยึดติดกับกล่องวงจร ทำการเจาะรูสายไฟออก เก็บสายไฟให้เป็นระเบียบ
7.4 การติดตั้งเครื่องสานพาน
ขั้นตอนที่1วางตำแหน่งของมอเตอร์ ตัวขับสายพานหน้าหลัง หาระยะห่างจากนั้นนำตัวเพลาขับสายพานลงไปติดตั้งบนฐานของชิ้นงาน วัดระยะเพื่อไม่ไห้สายพานตึงเกินไป
ขั้นตอนที่ 2 ทำการวัดความยาว ความสูง ของชุดสายพานเพื่อทำฝาครอบโดยฝาครอบปิดด้านซ้าย-ด้านขวา-ด้านบน เจาะรูด้านหน้าชองฝาครอบเพื่อใช้สำหรับวัตถุผ่านมาทางสายพาน
ขั้นตอนที่3 ขันยึดจุดต่างๆโดยใช้เป็นน็อตเกลียวปล่อยและเกลียวละเอียด ขนาด 0.8mm. จากนั้นนำสายพานขับเฟืองเชื่อมระหว่างแกนมอเตอร์และแกนขับสายพาน
ขั้นตอนที่4 สร้างตัวรองสายพานขึ้นมาพยุงด้านใต้สายพานเพื่อป้องกันไม่ไห้สายพานหย่อนเกินไป ขั้นตอนสุดท้าย นำฝาครอบชุดสายพานยึดด้วยน็อตกับฐานของชินงานพอตึงมือ จากนั้นนำสายไฟต่อเข้ากล่องวงจรจัดเรียงสายไฟให้เรียบร้อย
8 การทดสอบการทำงานของระบบ
การทำงานของระบบนี้ จะอธิบายเกี่ยวกับการทำงานของระบบการหมุนของสายพานและการทำงานระบบเซ็นเซอร์ RGB การนับจำนวนและ Servo
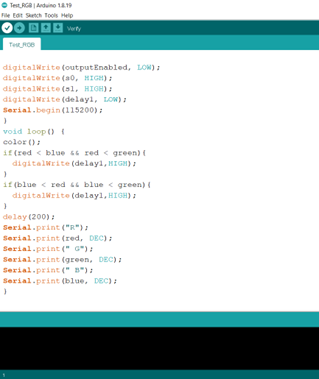
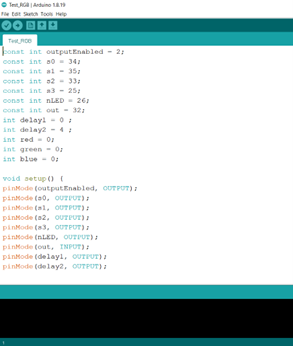
8.1 RGB Code
โมดูลวัดค่าสี RGB Color Sensor (TCS230/TCS3200) เซนเซอร์แยกสี ใช้แยกว่าสีที่อยู่หน้าเซนเซอร์นี้เป็นสีอะไร เอาต์พุตที่อ่านได้ ออกมาเป็นค่า R G B ใช้งานง่าย มีไฟ Flash สำหรับตรวจจับสีวัตถุในที่มืด สามารถสั่งควบคุมเปิดปิดไฟได้จากในโคดโปรแกรม พื้นหลังเป็นสีขาวมีกระบอกพลาสติกสีดำ กันไม่ให้สีอื่นไปรบกวน ไม่ต้องหาต่อที่กั้นแสงเพิ่มขาที่ใช้การสั่งงานคือ
ESP32 NodeMCU 38p ESP-32 CP2102-> TCS230/TCS3200
• 5V -> VCC
• 35 -> S1
• 34 -> S0
• GND -> GND
• 25 -> S3
• 33-> S2
• 26-> LED
• 32 -> OUT
โคดตัวอย่าง ดังภาพ

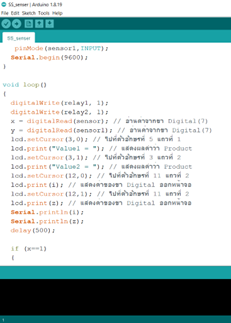
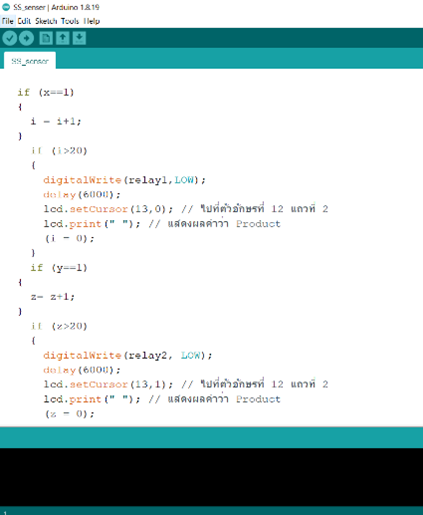
8.2Infrared Proximity Sensor Code Infrared Proximity Sensor เป็นเซนเซอร์ตรวจจับวัตถุที่ใช้หลักการสะท้อนของคลื่นอินฟาเรด สามารถกำหนดระยะในการทำงานได้โดยปรับค่าที่ Potentiometer ตรวจจับวัตถุได้ในช่วง 3-80cm โคดตัวอย่าง ดังภาพ
9. ปัญหาในการทดลอง
ปัญหาในการทดลองพบยังมีค่าที่ออกมาจากเซ็นเซอร์สียังมีค่าผิดพลาดในการทดลองสี และยังพบว่าเซ็นเซอร์การนับจำนวนยังมีค่าที่เกินว่าที่กำหนดไว้ไม่ตรงตามที่ต้องการ แต่โดยรวมตัวเครื่องสายพานและServoทำงานได้ปกติตามที่ต้องการ
10. ผลการทดลองการทำงาน
ผลการทดลองการทำงานของชุดจำลองเครื่อง คัดแยกสีอัตโนมัติพบว่าสามารถคัดแยกวัตถุที่เป็นสีแดง สีเขียว สีน้ำเงินและสีอื่นๆ ได้ และสามารถหมุนถาดเพื่อ รับวัตถุในตำแหน่งที่ต้องการได้ถูกต้อง โดยตัวอาดูโน สามารถท างานได้ตามโปรแกรมอย่างถูกต้อง จากการ ทดลองสรุปได้ว่าการทำงานใน 1 รอบการทำงาน (1 Cycle) จะพบเวลาเฉลี่ยของวัตถุที่ทดสอบ วัตถุสีแดง 9.96 วินาทีวัตถุสีเขียว 13.47 วินาทีวัตถุสีน้ำเงิน 16.58 วินาทีและวัตถุอื่นๆ 9.04 วินาที ซึ่งน้ำหนักไม่มี ผลต่อการเคลื่อนที่ของชุดสายพานแต่จะขึ้นอยู่กับ ระยะทางหมายความว่าถ้าออกแบบความยาวของ สายพานมากขึ้นระยะเวลาเฉลี่ยในการคัดแยกวัตถุสีจะ เพิ่มขึ้นตาม การวางเซนเซอร์พื้นผิวสีให้เหมาะสมกับ การสะท้อนออกมาของวัตถุและในส่วนของโปรแกรมที่ นำมาควบคุม


